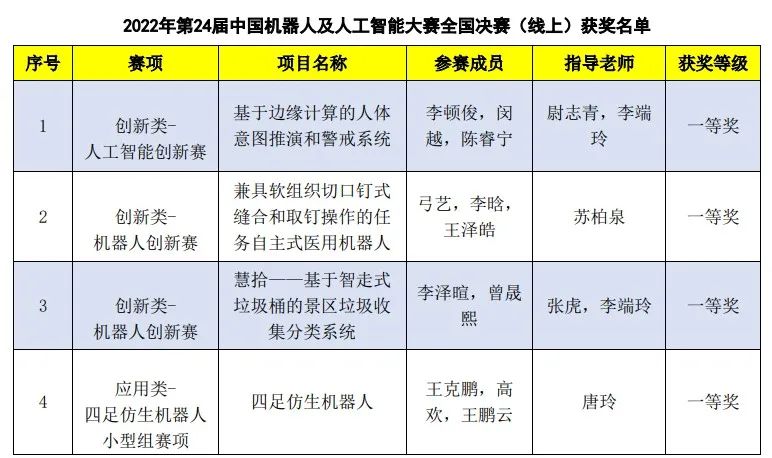
日前,第24届中国机器人及人工智能大赛全国总决赛(线上)落下帷幕。经过激烈的角逐,通过省级竞赛推荐国赛与全国初评推荐国赛,我校共有4支团队项目进入全国决赛,均斩获全国一等奖。其中,“基于边缘计算的人体意图推演和警戒系统”项目获得“创新类-人工智能创新赛”赛道全国一等奖;“兼具软组织切口钉式缝合和取钉操作的任务自主式医用机器人”项目、“慧拾——基于智走式垃圾桶的景区垃圾收集分类系统”项目获得“创新类-机器人创新赛”赛道全国一等奖;“四足仿生机器人”项目获得“应用类-四足仿生机器人小型组赛项”赛道全国一等奖。
中国机器人及人工智能大赛是一项历史悠久、影响广泛的全国性学科竞赛。作为中国人工智能学会最早主办的竞赛之一,大赛为我国培养了大量“能动手”、“敢创新”、“善协作”的复合型人才。大赛已列入中国高等教育学会发布的《2020年全国普通高等学校学科竞赛排行榜》《2021年全国普通高校大学生竞赛分析报告》。本届大赛启动以来,在学校的大力支持下,各参赛队伍积极备战,表现优异,成果突出。赛前充分备赛,适应线上比赛规则并完善提高自身项目;比赛过程中,各项目都发挥稳定、表现出色,充分展现出北邮学子的创新精神与严谨学风。
基于边缘计算的人体意图推演和警戒系统
(创新类 人工智能创新赛一等奖)
参赛组别:人工智能创新赛
申报单位:信息与通信工程学院
团队成员:李顿俊、闵越、陈睿宁
指导老师:尉志青、李端玲
项目介绍:
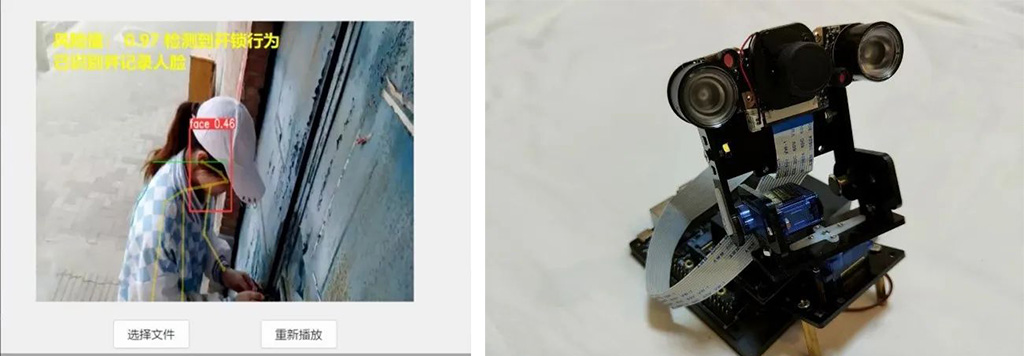
本项目是一个软、硬结合的产品。软件部分基于YOLOv5s、Openpose等进行开发,其关键技术是人体骨架识别、人脸识别、行为模式匹配。可疑行为发生时,系统能准确识别判断、储存可疑人员面部照片,接入平台向相关人员发出警报。硬件部分基于Nvidia Jetson Xavier NX开发板进行开发,配有可见光摄像机、红外摄像机、扬声器等模块。
主要创新点有三:人脸识别和人体骨架识别的协同;监控能够通过边缘计算设备进行数据处理;通过数据库保存可疑人脸身份信息。
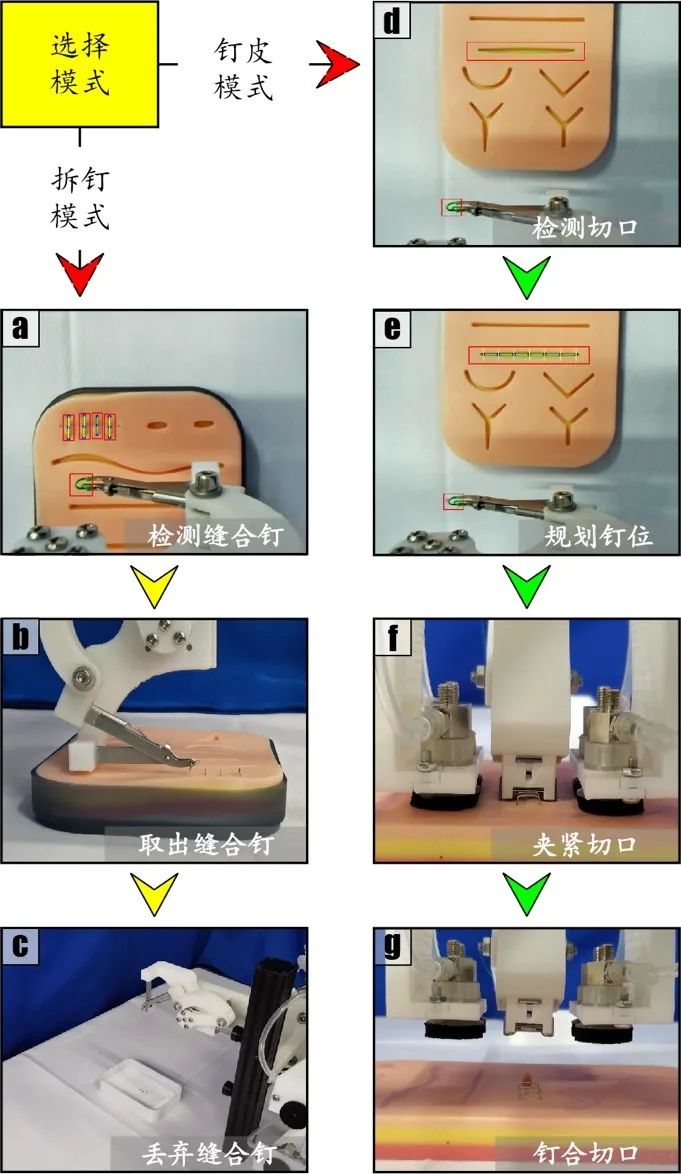
兼具软组织切口钉式缝合和取钉操作的任务自主式医用机器人
(创新类 机器人创新赛一等奖)
参赛组别:机器人创新赛
申报单位:现代邮政学院(自动化学院)
团队成员:弓艺、李晗、王泽皓
指导老师:苏柏泉
项目介绍:
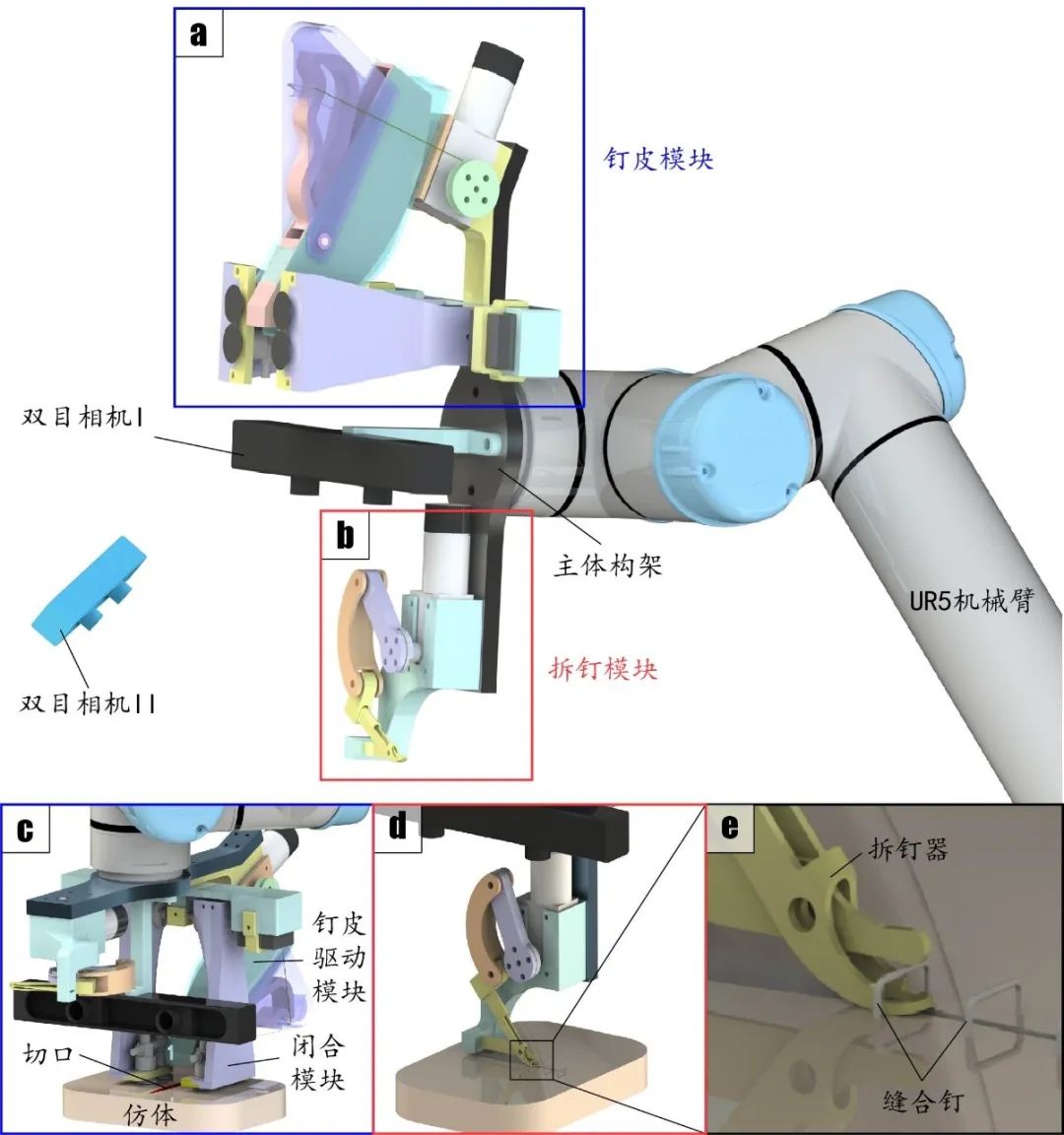
人体皮肤经常出现伤口,钉皮器是一种常用于伤口闭合的医疗器械,其效果与缝合相近,而且闭合速度快、伤口对合整齐,有利于伤口快速愈合,减少淤痕增生。开运娱乐(集团)官方网站医疗机器人实验室(Medical Robotics Laboratory, BUPT)首次提出了一种可以自主完成钉皮和拆钉的医疗机器人系统,以及相应的终端结构设计、图像处理方法和操作规划方法等,有效地完成了钉皮和取钉任务,填补了这一领域的空白。与外科医生手动操作相比,本项目提出的自主钉皮和拆钉医疗机器人系统能更迅速、精确地闭合伤口,降低感染的可能性,减少外科医生的工作量。
慧拾·基于智走式垃圾桶的景区垃圾收集分类系统
(创新类 机器人创新赛一等奖)
参赛组别:机器人创新赛
申报单位:电子工程学院
团队成员:李泽暄、曾晟熙
指导老师:张虎、李端玲


项目介绍:
这款智能垃圾桶,针对当今热门的垃圾回收与垃圾分类问题,在规模和人流量较大的公共娱乐场所,都有广泛的实用性,可大大缓解目前景区垃圾处理的棘手问题。为了便捷行人的垃圾投放而设计为可移动形式,垃圾桶可以按设计的线路进行移动,并形成一个从收集垃圾到卸载垃圾的循环过程。可以通过系统检测到园区内垃圾桶的状态,可根据人流量调整园区内垃圾桶数量。智能垃圾桶可通过算法识别垃圾,以便更好有效地进行垃圾的分类,也能改善社会、公园园区,公共场所等地的环境质量,符合当今社会倡导的分类要求。

四足仿生机器人
(应用类 四足仿生机器人小型组一等奖)
参赛组别:四足仿生机器人小型组
申报单位:人工智能学院
团队成员:王克鹏、高欢、王鹏云
指导老师:唐玲
项目介绍:
四足机器人由于其优良的平衡性、灵活性和适应性,能够在复杂工况下稳定完成任务,一直是机器人研究领域的热点。本项目以四足机器人为研究对象,在仿生结构、关节驱动、感知运动规划等技术领域进行研究,通过硬件与软件系统结合的方式,以STM32F4为主控芯片搭建四足仿生机器人,使用OpenMV模块进行视觉处理,并基于赛道工况设计步态规划算法,从而使机器人具有良好的运动性能、稳定性能和对复杂地形的适应能力。